The primary goal of this project is to design and develop an autonomous fire-fighting robot vehicle capable of detecting, approaching, and extinguishing fires without the need for human intervention.
In hazardous environments such as industrial sites, warehouses, or residential buildings during fire outbreaks, early detection and suppression are critical to minimizing damage and saving lives. However, these situations often pose significant risks to firefighters, such as exposure to toxic gases, extreme heat, and structural instability.
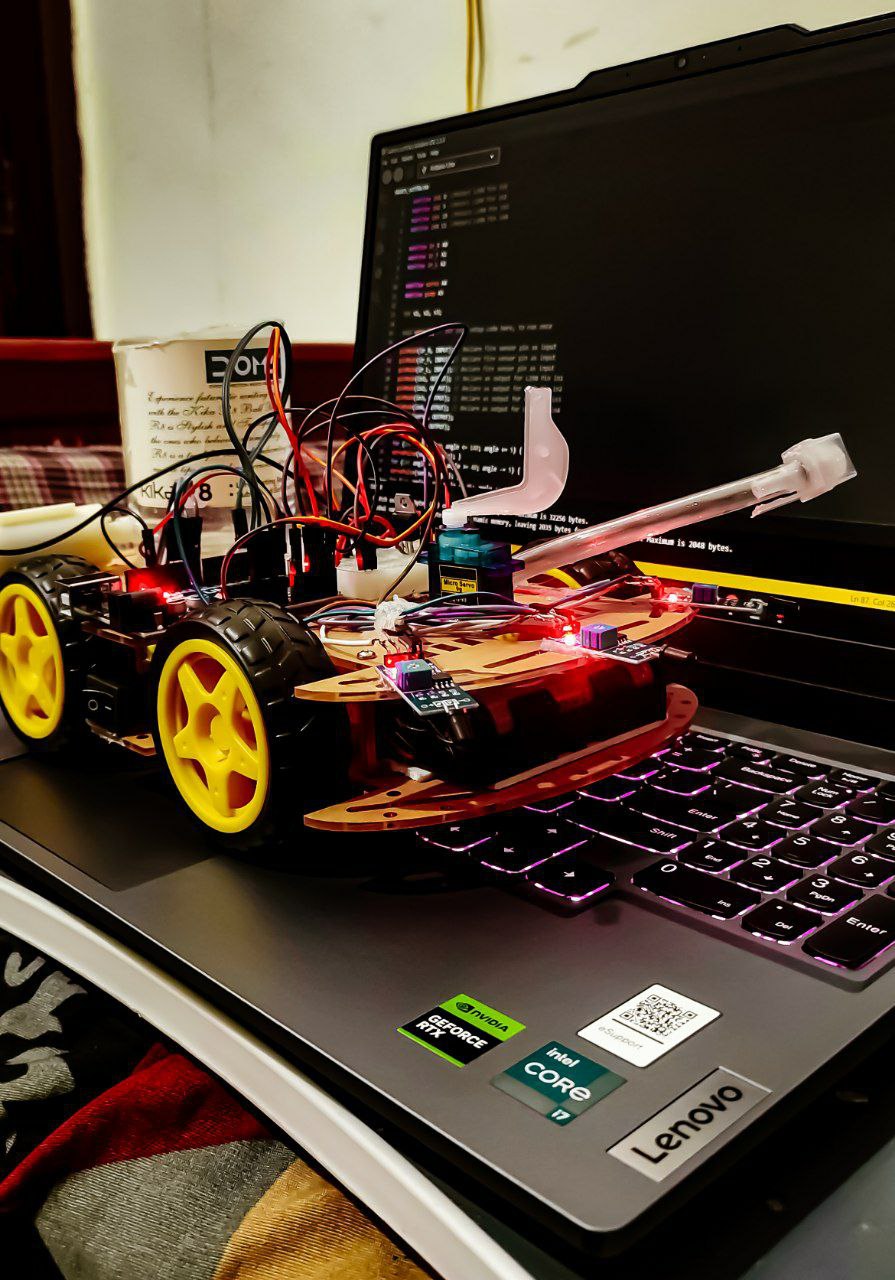
This autonomous robot is designed to mitigate these risks by identifying fire sources in a defined area, moving towards the fire autonomously, and then extinguishing the flames using a water pump mechanism. By integrating fire detection sensors, motors for mobility, and a water-based suppression system, the robot can act swiftly and efficiently in emergency scenarios. Such a system is ideal for environments where rapid response is essential but human access may be delayed or dangerous. In industrial facilities with high fire risks, this robot can patrol designated areas, continuously scanning for fire hazards. In residential or commercial spaces, the robot can act as a first responder, tackling smaller fires before they escalate.
This project not only highlights the use of IoT technology for real-world applications but also showcases the potential of robotics in life-saving operations.
The robot uses three infrared flame sensors, strategically positioned to cover more than a 180-degree field of view. These sensors detect fire by sensing infrared radiation emitted from flames. By covering a wide angle, the sensors ensure that the robot can detect fire from various directions without needing to rotate frequently. Once the flame is detected, the sensors send signals to the Arduino, which triggers the fire-fighting mechanism.
After detection, the robot autonomously navigates towards the fire using the motor control system. The L298 motor driver and the four B.O motors provide smooth and responsive movement. The robot calculates the direction based on which sensor detects the fire and adjusts its path accordingly. This ensures that the robot heads directly towards the fire source without human input, taking full advantage of its wide sensor coverage.
Once the robot reaches the vicinity of the fire, the servo motor adjusts the water nozzle based on the fire's location. The wide sensor coverage ensures that the robot approaches the fire accurately, and the water pump is activated to spray water in a argeted manner. The system continues to operate until the sensors detect no further fire, ensuring effective fire suppression.
With the wide-angle coverage of the infrared flame sensors and autonomous movement, the robot performs its tasks with minimal human involvement. This reduces the risk of exposure to hazardous conditions, as the robot can independently detect, move to, and suppress fires without needing manual control, making it a safe and efficient solution for fire-fighting in risky environments.
#define enA 10 // Enable1 L298 Pin enA
#define in1 9 // Motor1 L298 Pin in1
#define in2 8 // Motor1 L298 Pin in2
#define in3 7 // Motor2 L298 Pin in3
#define in4 6 // Motor2 L298 Pin in4
#define enB 5 // Enable1 L298 Pin enB
#define ir_R A0 // Right IR sensor
#define ir_F A1 // Front IR sensor
#define ir_L A2 // Left IR sensor
#define servoPin A4 // Servo pin for water pump
#define pump A5 // Water pump pin
int fireThreshold = 900; // Sensitivity threshold for detecting fire
int stopRangeThreshold = 600; // Stop range threshold to ensure robot moves closer before stopping
void setup() {
Serial.begin(9600); // Start serial communication
pinMode(ir_R, INPUT); // Set fire sensor pins as input
pinMode(ir_F, INPUT);
pinMode(ir_L, INPUT);
pinMode(enA, OUTPUT); // Motor control pins as output
pinMode(in1, OUTPUT);
pinMode(in2, OUTPUT);
pinMode(in3, OUTPUT);
pinMode(in4, OUTPUT);
pinMode(servoPin, OUTPUT); // Set servo pin as output
pinMode(pump, OUTPUT); // Set pump pin as output
// Enable the motors
analogWrite(enA, 255); // Set motor speed to maximum
analogWrite(enB, 255);
}
void loop() {
int s1 = analogRead(ir_R); // Read right sensor
int s2 = analogRead(ir_F); // Read front sensor
int s3 = analogRead(ir_L); // Read left sensor
// Print sensor readings for debugging
Serial.print("Right: ");
Serial.print(s1);
Serial.print(" | Front: ");
Serial.print(s2);
Serial.print(" | Left: ");
Serial.println(s3);
// Control logic
if (s2 < fireThreshold) { // Fire detected in front
if (s2 > stopRangeThreshold) { // Fire detected but outside stop range
moveForward(); // Move towards the fire
} else { // Stop and activate water pump when within range
stopMotors();
activatePump(); // Spray water
}
} else if (s1 < fireThreshold) { // Fire detected on the right
alignLeft(); // Turn left and adjust alignment
} else if (s3 < fireThreshold) { // Fire detected on the left
alignRight(); // Turn right and adjust alignment
} else { // No fire detected
stopMotors();
stopPump(); // Ensure pump is turned off when no fire
}
delay(100); // Delay for stability
}
void activatePump() {
digitalWrite(pump, HIGH); // Activate the pump
// Continuously move servo from 50 degrees to 130 degrees until the fire stops
while (analogRead(ir_F) < fireThreshold) {
// Move the servo from 50 degrees to 130 degrees
for (int angle = 50; angle <= 130; angle += 3) {
servoPulse(servoPin, angle);
}
// Move the servo back from 130 degrees to 50 degrees
for (int angle = 130; angle >= 50; angle -= 3) {
servoPulse(servoPin, angle);
}
// Check again if the fire is still detected before repeating the loop
if (analogRead(ir_F) >= fireThreshold) {
break; // Exit the loop if fire is no longer detected
}
}
stopPump(); // Stop the pump when fire is no longer detected
}
void stopPump() {
digitalWrite(pump, LOW); // Deactivate the pump
}
void servoPulse(int pin, int angle) {
int pwm = (angle * 11) + 500; // Convert angle to microseconds
digitalWrite(pin, HIGH);
delayMicroseconds(pwm);
digitalWrite(pin, LOW);
delay(50); // Refresh cycle of servo
}
// Function to move the robot forward
void moveForward() {
digitalWrite(in1, LOW); // Right motor forward
digitalWrite(in2, HIGH); // Right motor backward
digitalWrite(in3, LOW); // Left motor forward
digitalWrite(in4, HIGH); // Left motor backward
}
// Function to turn slightly left and re-align when fire is detected on the right
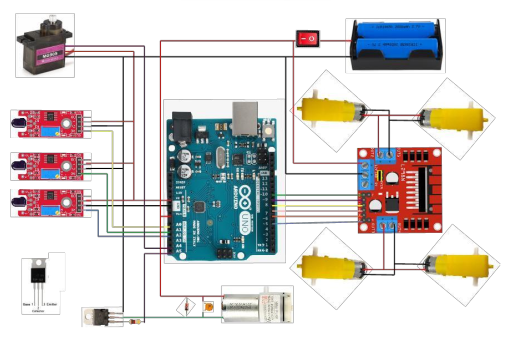
Three infrared flame sensors are integrated with the Arduino Uno, covering more than a 180-degree angle. These sensors continuously monitor the environment for signs of fire within their range. When any of the sensors detect fire, they send a signal to the Arduino, which initiates the fire-fighting sequence. The system then activates the motor control to direct the robot towards the fire based on the sensor input. Once in position, the fire suppression mechanism is triggered to extinguish the fire.
The Arduino controls the movement of the robot via the L298 motor driver. The four B.O motors are powered to move the robot towards the fire. The movement is designed to be automatic, with predefined algorithms to approach the fire from the most efficient path. The robot uses differential steering to navigate, meaning the left and right wheels can move at different speeds or in different directions, allowing the robot to turn on the spot.
Once the robot reaches the fire, the Arduino triggers the servo motor to adjust the water nozzle's angle. The pump is then activated using the TIP122 transistor, and water is sprayed over the fire until it is extinguished. The servo motor ensures that the water spray is directed precisely at the source of the fire.
When the robot is powered on, all components (sensors, motors, and actuators) are initialized, and the robot begins scanning its environment using the three flame sensors. These sensors continuously monitor for fire in a wide field of view, covering more than 180 degrees. The robot remains idle, awaiting any fire detection signal to trigger further actions.
If one or more of the infrared flame sensors detects a fire, the Arduino processes the signal. It identifies the location of the fire based on which sensor is triggered and calculates the distance between the robot and the fire. The Arduino then sends commands to the motor driver to move the robot toward the fire’s direction, starting the fire-fighting sequence.
The four B.O motors, controlled by the L298 motor driver, propel the robot towards the detected fire. Using the data from the sensors, the robot adjusts its movement to ensure it is heading directly towards the source of the fire. It continues moving until it comes within a predefined range where it can effectively suppress the fire.
Once the robot reaches the vicinity of the fire, the Arduino controls the servo motor to adjust the water nozzle’s angle. This ensures that the nozzle is aimed directly at the fire for precise water delivery. The targeting system allows for optimal use of water, making sure the spray reaches the fire’s core.
After positioning the nozzle, the water pump is activated via the TIP122 transistor. The pump draws water from the onboard reservoir and sprays it over the fire through the nozzle. This process continues until the sensors no longer detect any flames, indicating that the fire has been extinguished.
Once the fire is extinguished, the system resets itself to its idle state. The robot stops moving, the water pump shuts off, and the flame sensors resume scanning the environment for any new fire outbreaks, ready to initiate the sequence again if needed.
This fire-fighting robot vehicle exemplifies the synergy between IoT, automation, and sensor technology to address fire hazards in real-world scenarios. By leveraging three infrared flame sensors, the robot autonomously scans its environment for fire, even across a wide angle, ensuring comprehensive coverage without requiring human supervision. Upon detecting a fire, the system uses motorized control to navigate towards the source, demonstrating intelligent decision-making and precise movements in complex environments. The incorporation of a servo-controlled water nozzle allows for targeted fire suppression, reducing water wastage and ensuring efficient extinguishing.
The robot's reliance on low-cost components like B.O motors, an L298 motor driver, and an Arduino Uno make it affordable and accessible for educational and prototyping purposes. The simplicity of the design ensures ease of replication, allowing others to build similar robots for diverse applications. Moreover, its adaptability means the system can be scaled or modified to handle larger fires, be equipped with different sensors, or operate in more challenging environments. This project provides a robust foundation for developing autonomous fire-fighting systems in hazardous industrial sites, remote locations, or areas inaccessible to humans, significantly improving safety and response times in high-risk environments.